

Вращающийся перевернутый маятник для робота Arduino, набор «сделай сам» для STM32, круглый перевернутый маятник, PID-управление, поколенный код Simulink






Вращающийся перевернутый маятник для робота Arduino, набор «сделай сам» для STM32, круглый перевернутый маятник, PID-управление, поколенный код Simulink
| Есть в наличии: 999 шт. | |
| Артикул: | AE-1005009170268169 |
1 731 000 UZS
Youfang Smart умнее, технологичнее и здоровее.
Мы являемся продажей No1 в робототехнической промышленности и специализируемся на разработке научно-технологических, технологических, образовательных и обучающих предприятий.Этот робот-программирование представляет собой новый, очень интеллектуальный обучающий робот-программировальный робот, разработанный нашим институтом, а также просвещение детей и инженеров для обучения образованию. Время от времени мы будем выпускать новые продукты для технологий, образования и здоровья, которые могут использоваться в качестве детских игрушек. подарки, обучающая депостер для взрослых.Я верю, что вам понравится наш робот.
Кстати, если вам нравится наш магазин, пожалуйста, добавьте наш магазин в свой любимый магазин, вы сможете вовремя получить информацию о новых поступлениях и скидках.
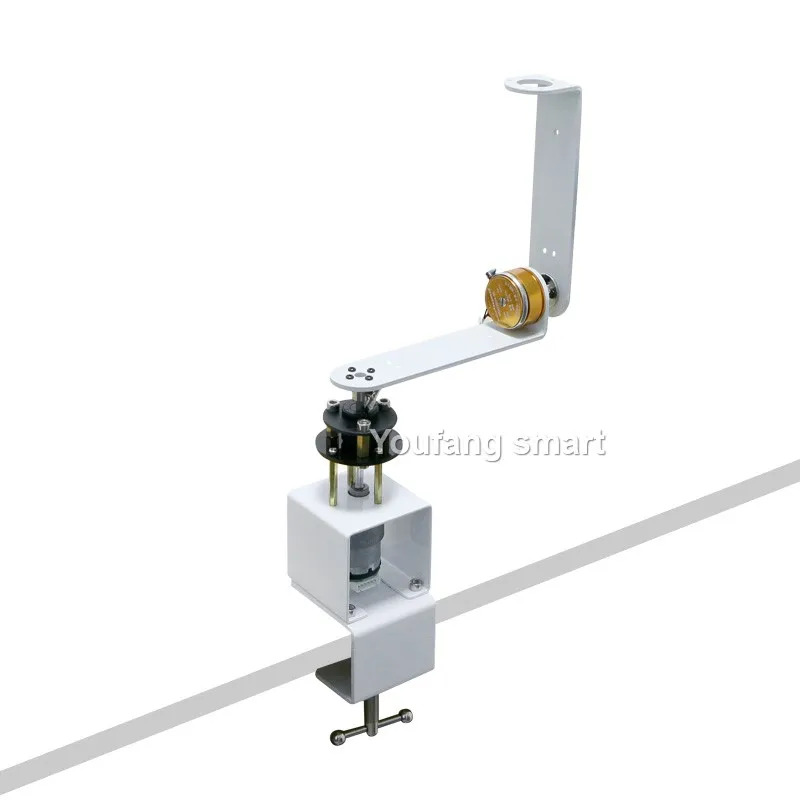
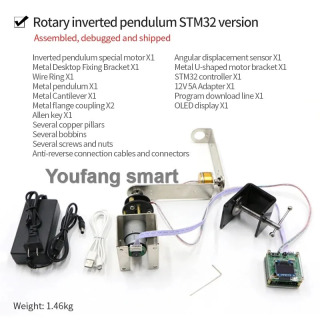
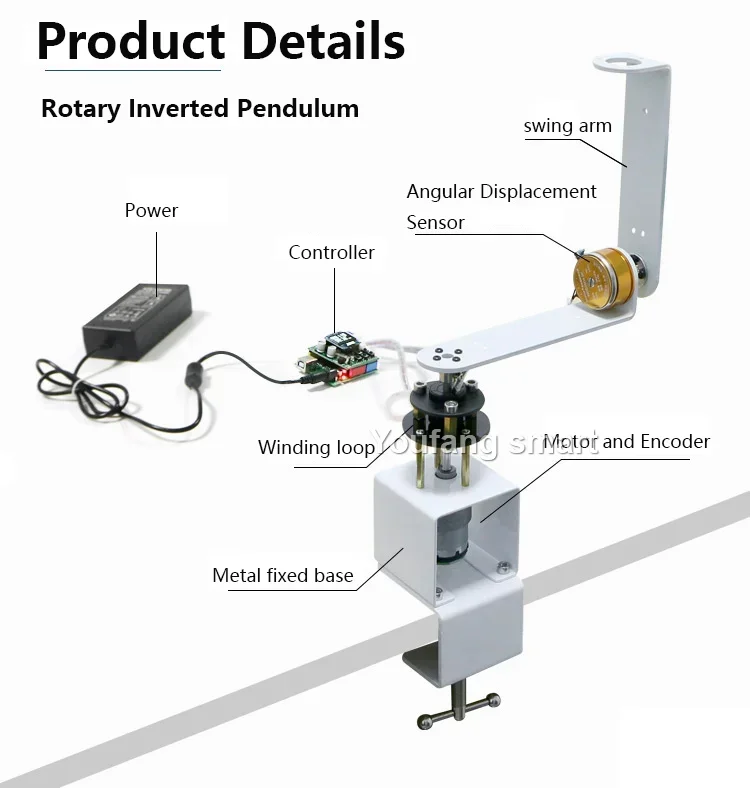
Вращающийся перевернутый маятник для робота Arduino DIY Kit для STM32, круглый перевернутый маятник, комплект ПИД-регулирования, имитирующий генерируемый тренд
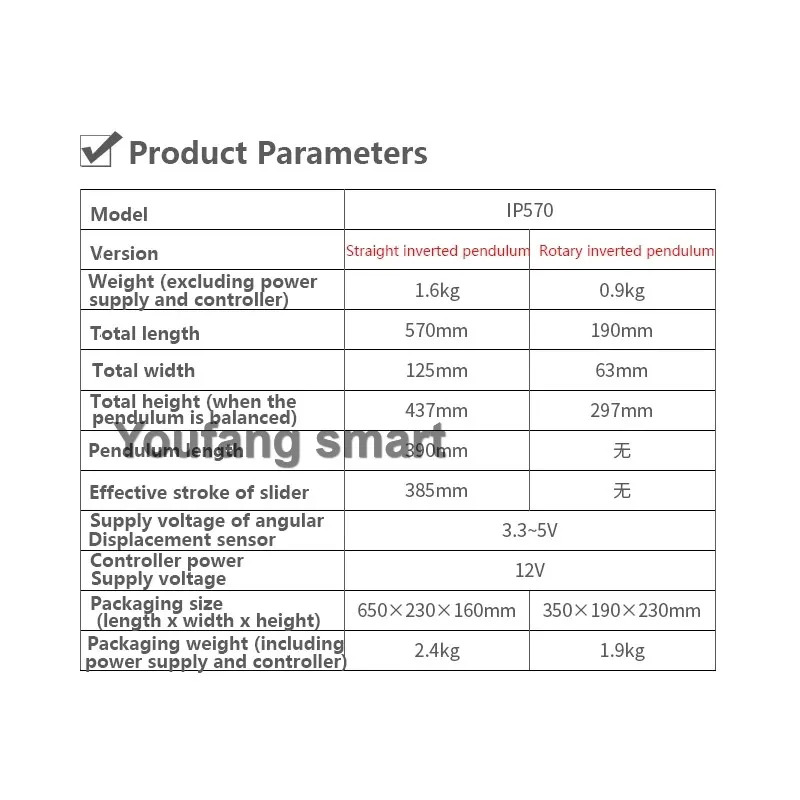
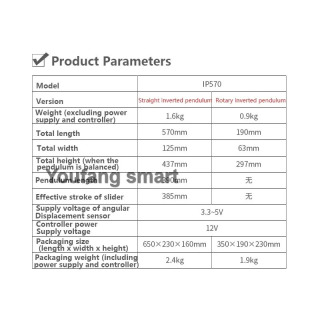
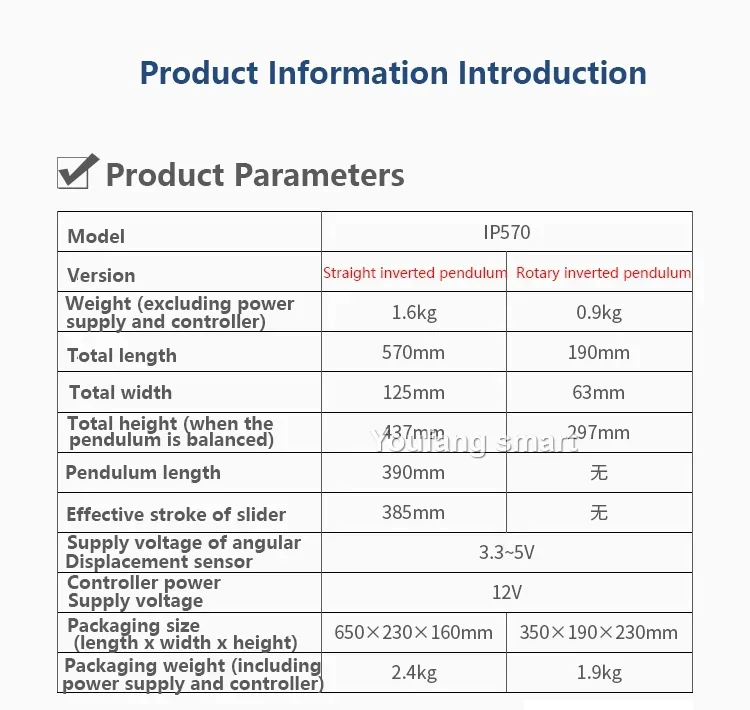
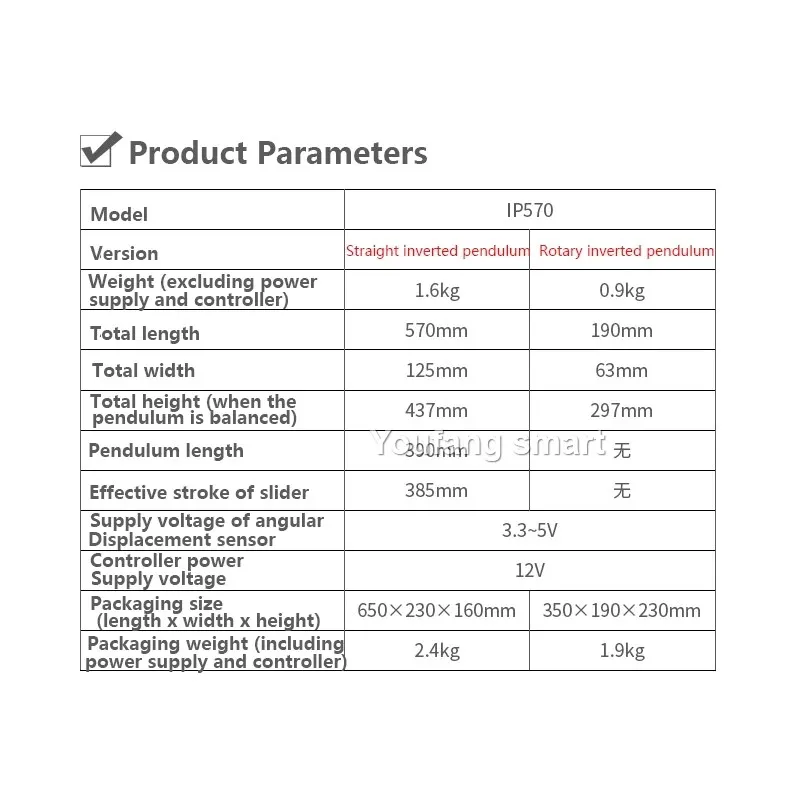
Модель: IP570
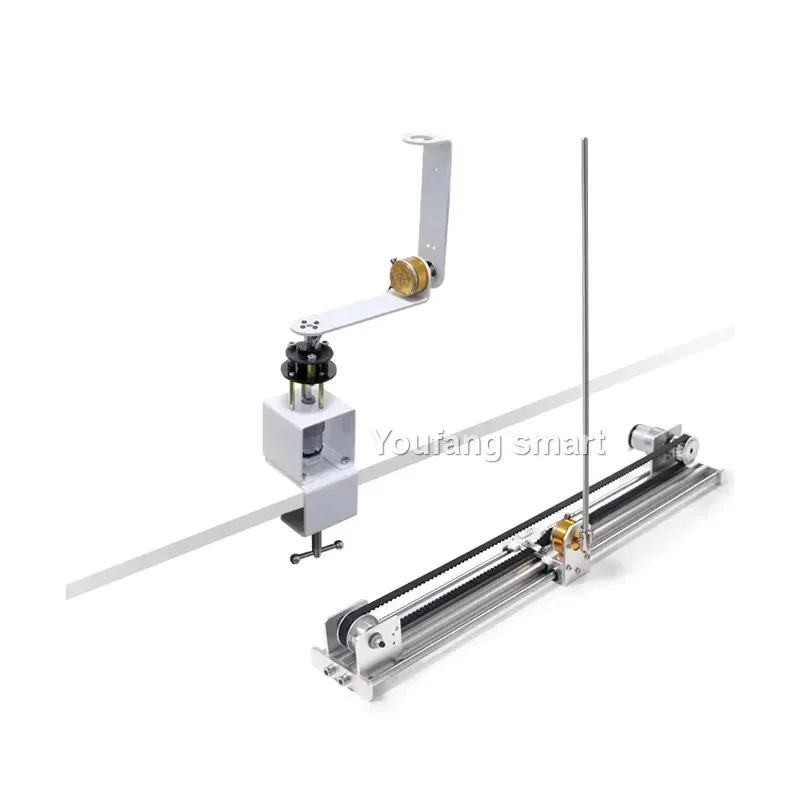
Версия: Вращающийся перевернутый маятник.
Вес (без источника питания и контроллера): 0,9 кг.
Общая длина: 190 мм
Общая ширина: 63 мм
Общая высота (баланс шатуна): 297 мм.
Длина поворотного стержня: Нет
Эффективное путешествие слайдера: нет
Напряжение питания датчика углового перемещения: 3,3 ~ 5 В.
Напряжение источника питания контроллера: 12 В
Размер упаковки (Д х Ш х В): 350x190x230 мм.
Вес упаковки (включая блок питания и контроллер): 1,9 кг.
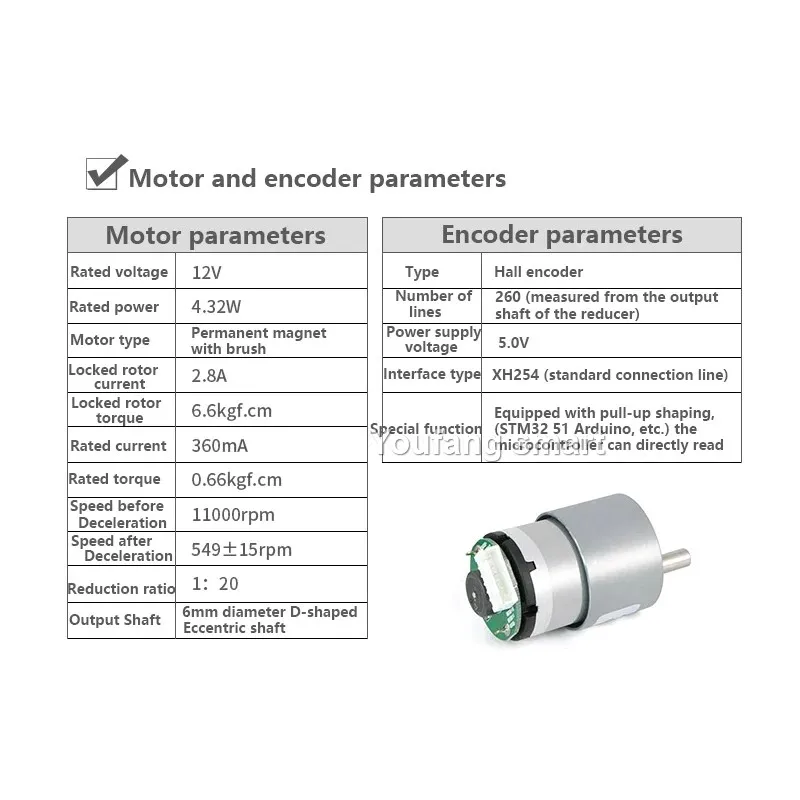
Параметр двигателя
Номинальное напряжение: 12 В
Номинальная мощность: 4,32 Вт
Тип двигателя: щетка с постоянными магнитами.
Ток блокировки: 2,8 А
Заблокированный крутящий момент: 6,6 кгс.см
Номинальный ток: 360 мА
Номинальный крутящий момент: 0,66 кгс.см.
Скорость перед замедлением: 1100 об/мин.
Скорость после замедления: 549, 15 об/мин.
Коэффициент замедления: 1:20
Выходной вал: диаметр эксцентрикового вала D 6 мм.
Параметр энкодера
Тип: Энкодер Холла
Количество линий: 260 (измеряется по выходному валу редуктора)
Напряжение питания: 5,0 В
Тип интерфейса: XH2,54 (стандартный кабель)
Особенности: С подтягивающим формованием (STM32/Arduino и т. д.)MCU можно читать напрямую
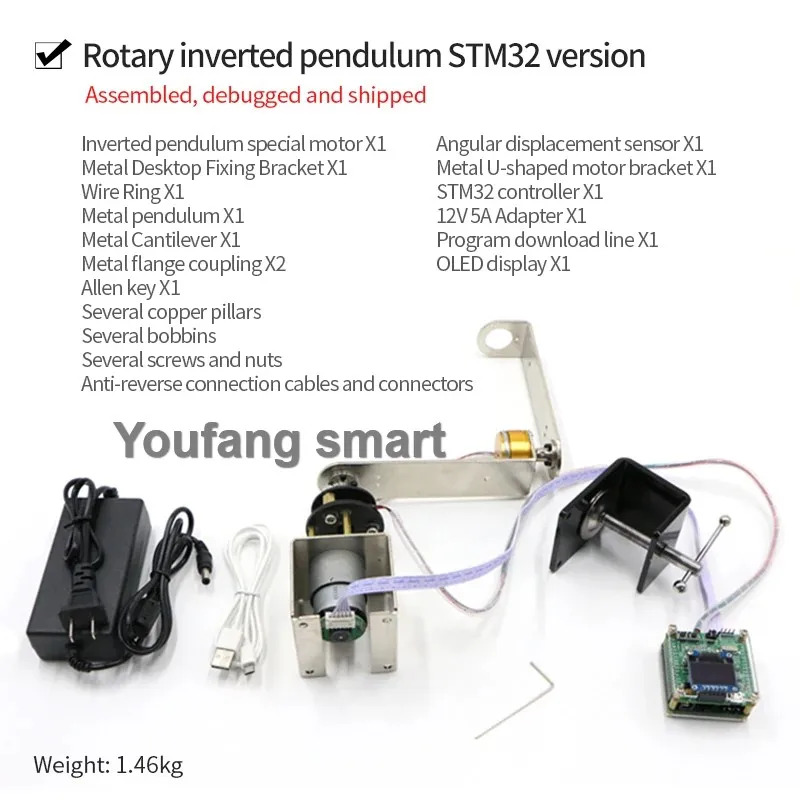
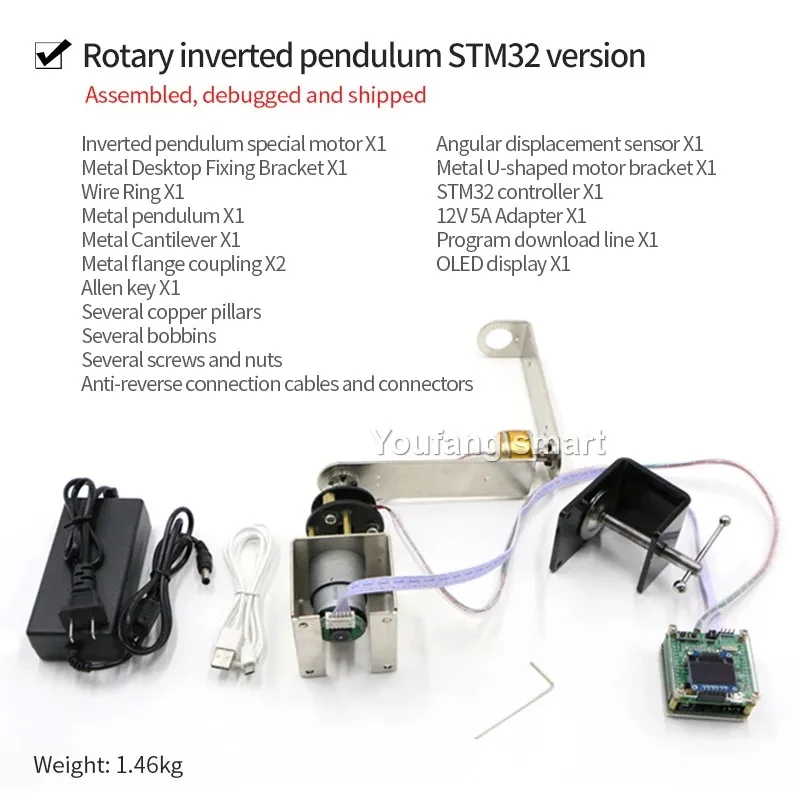
Упаковочный лист:
1.Без контроллера: 1 комплектПеревернутый маятник
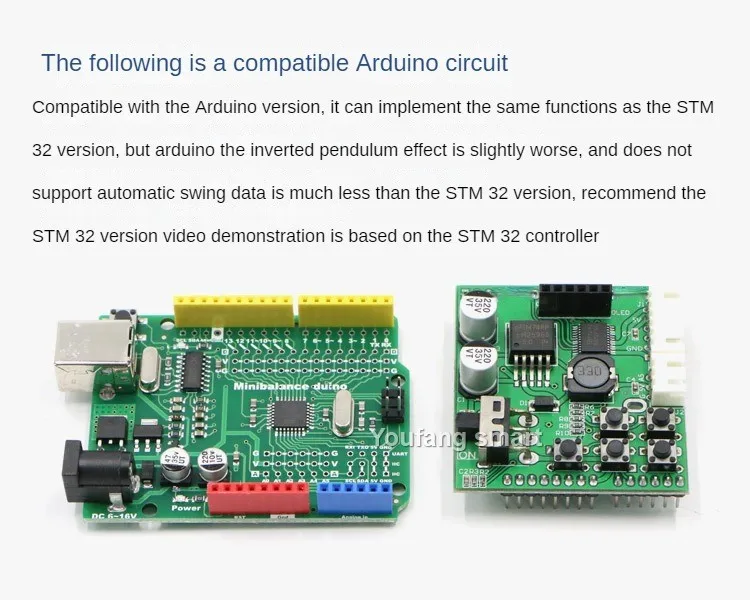
2.Для Arduino полный комплект: 1 комплект Перевернутый маятник + для контроллера Arduino
2.STM32 полный комплект: 1 комплект Перевернутый маятник + контроллер STM32
Лучшее качество, лучший сервис!!
Технические документы, как показано ниже, самая полная разработка и дизайн, вы заслуживаете того, чтобы иметь этот инженерный проект, мы делаем технологии в первую очередь, обслуживаем, а не просто продаем товары.
Если вам нужен руководство по программам и файлам разработки роботов, такие как открытый исходный код, документ по установке и так далее.
пожалуйста, свяжитесь с нами и оставьте свой адрес электронной почты.










Товар добавлен в корзину!
Отзывы покупателей