

Arduino roboti uchun aylanadigan teskari mayatnik STM32 dumaloq teskari mayatnik uchun DIY to'plami PID boshqaruvini yaratish Simulink kodi






Arduino roboti uchun aylanadigan teskari mayatnik STM32 dumaloq teskari mayatnik uchun DIY to'plami PID boshqaruvini yaratish Simulink kodi
| Mavjud: 999 шт. | |
| Mavzu: | AE-1005009170268169 |
1 731 000 UZS
Youfang Smart умнее, технологичнее и здоровее.
Мы являемся продажей No1 в робототехнической промышленности и специализируемся на разработке научно-технологических, технологических, образовательных и обучающих предприятий.Этот робот-программирование представляет собой новый, очень интеллектуальный обучающий робот-программировальный робот, разработанный нашим институтом, а также просвещение детей и инженеров для обучения образованию. Время от времени мы будем выпускать новые продукты для технологий, образования и здоровья, которые могут использоваться в качестве детских игрушек. подарки, обучающая депостер для взрослых.Я верю, что вам понравится наш робот.
Кстати, если вам нравится наш магазин, пожалуйста, добавьте наш магазин в свой любимый магазин, вы сможете вовремя получить информацию о новых поступлениях и скидках.
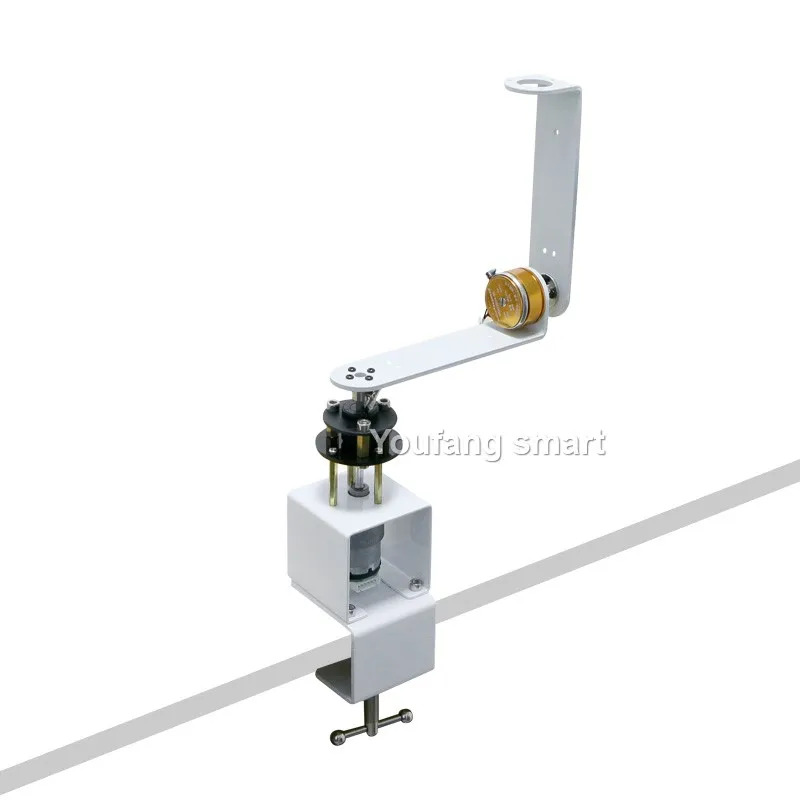
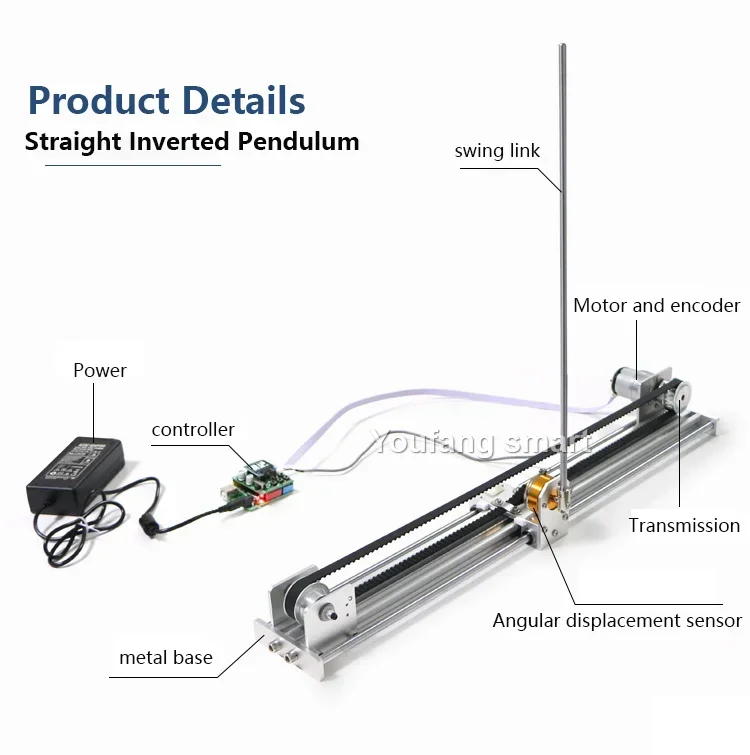
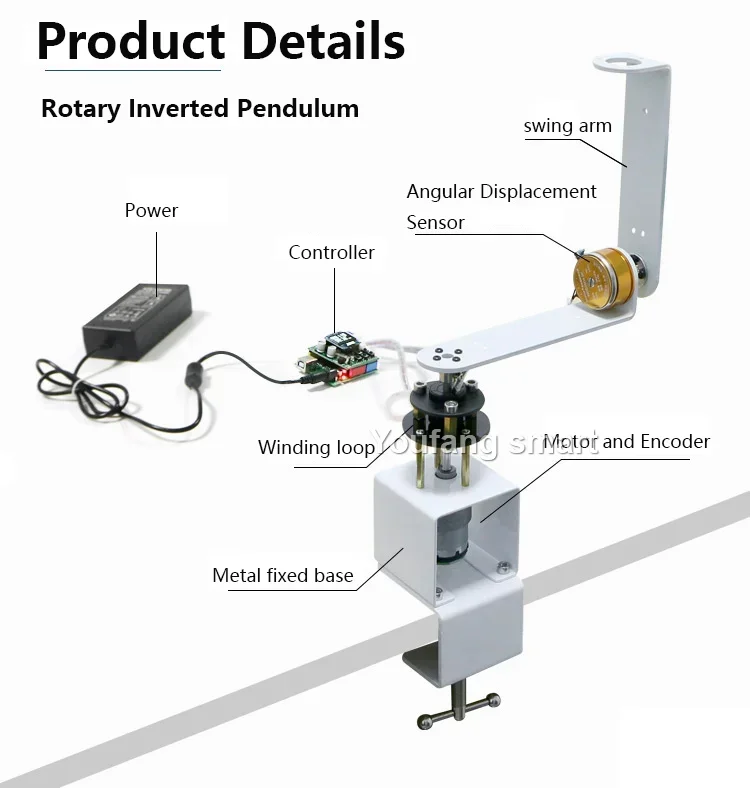
Вращающийся перевернутый маятник для робота Arduino DIY Kit для STM32, круглый перевернутый маятник, комплект ПИД-регулирования, имитирующий генерируемый тренд
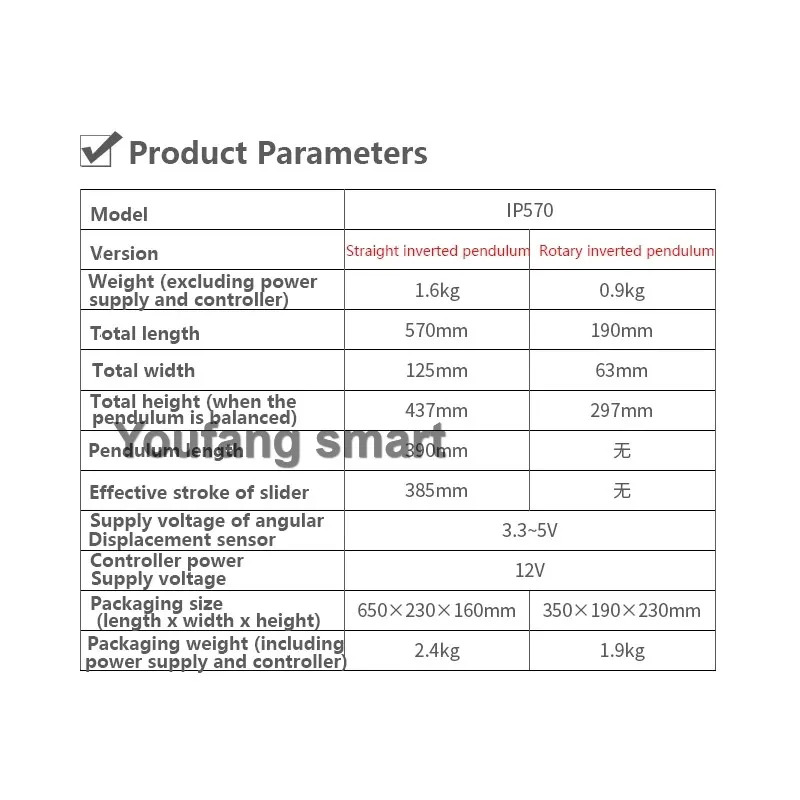
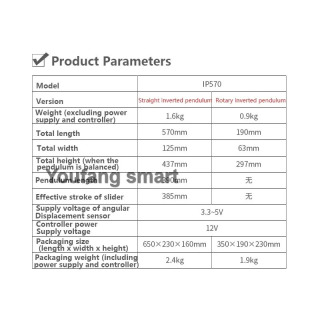
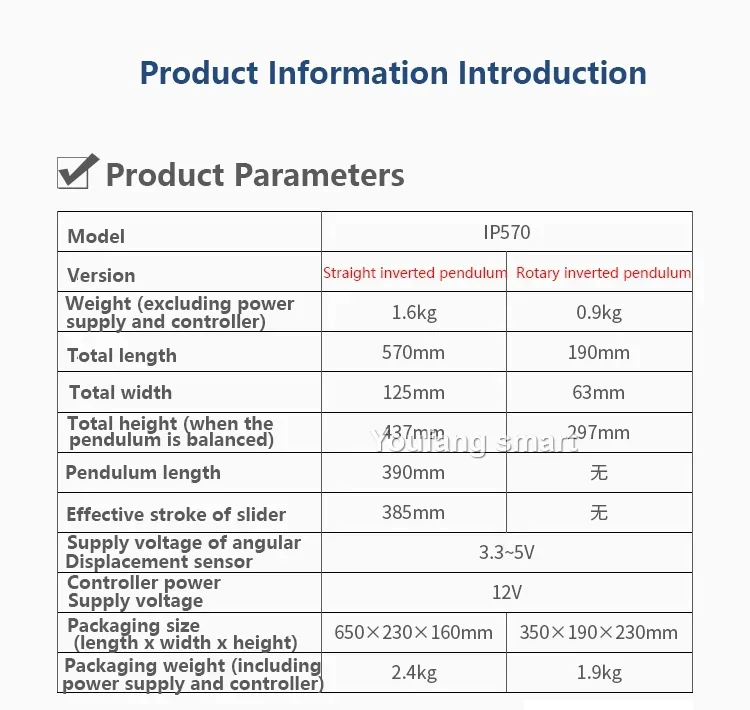
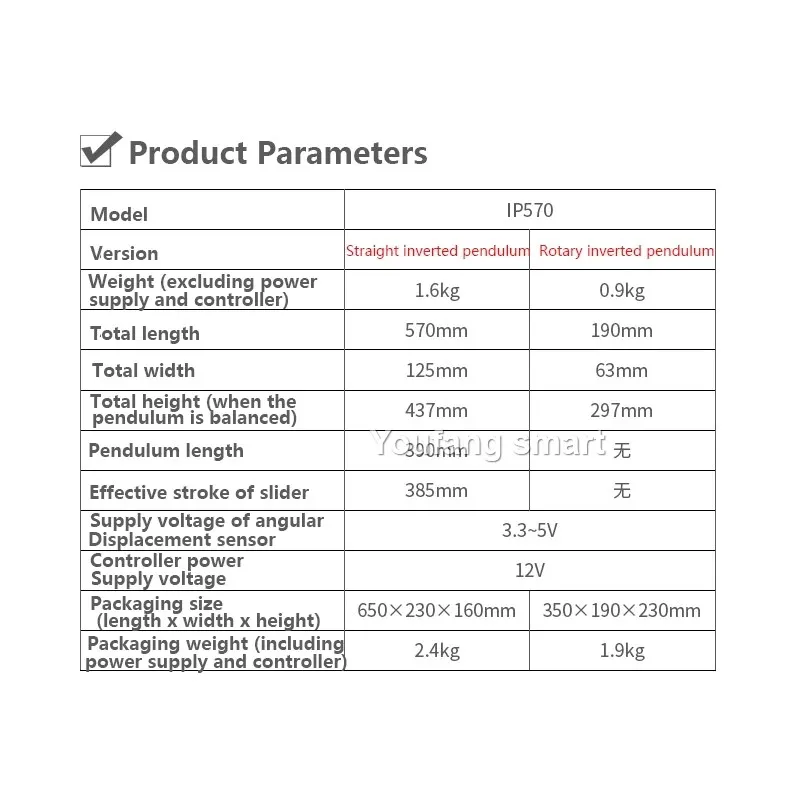
Модель: IP570
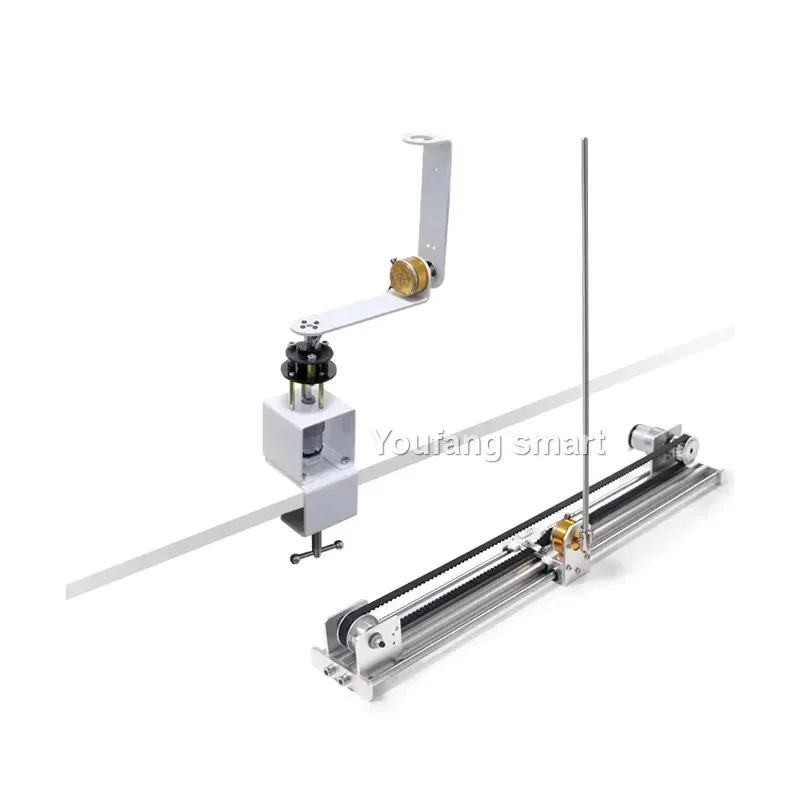
Версия: Вращающийся перевернутый маятник.
Вес (без источника питания и контроллера): 0,9 кг.
Общая длина: 190 мм
Общая ширина: 63 мм
Общая высота (баланс шатуна): 297 мм.
Длина поворотного стержня: Нет
Эффективное путешествие слайдера: нет
Напряжение питания датчика углового перемещения: 3,3 ~ 5 В.
Напряжение источника питания контроллера: 12 В
Размер упаковки (Д х Ш х В): 350x190x230 мм.
Вес упаковки (включая блок питания и контроллер): 1,9 кг.
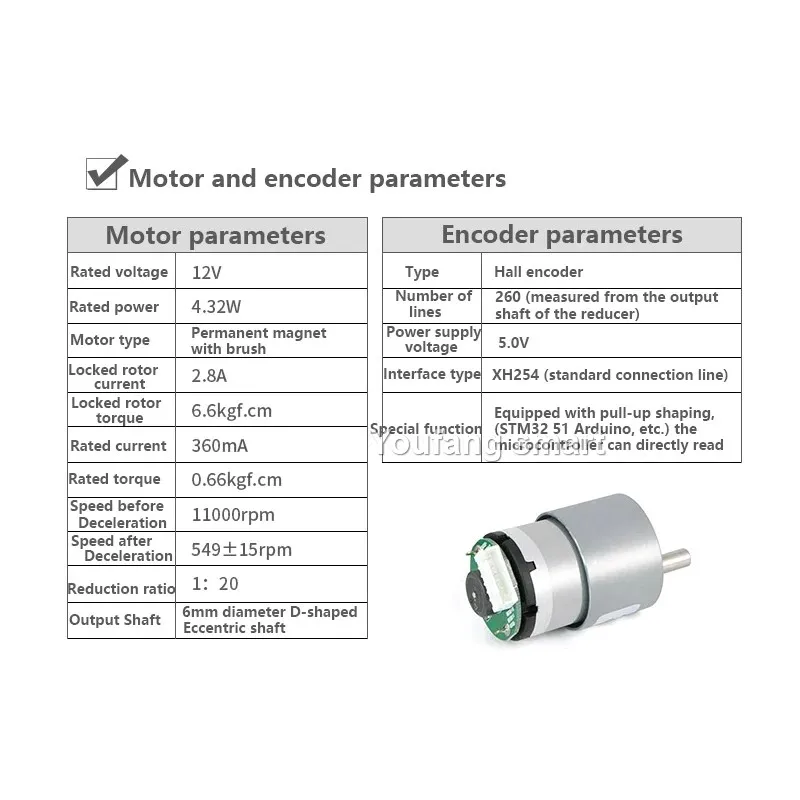
Параметр двигателя
Номинальное напряжение: 12 В
Номинальная мощность: 4,32 Вт
Тип двигателя: щетка с постоянными магнитами.
Ток блокировки: 2,8 А
Заблокированный крутящий момент: 6,6 кгс.см
Номинальный ток: 360 мА
Номинальный крутящий момент: 0,66 кгс.см.
Скорость перед замедлением: 1100 об/мин.
Скорость после замедления: 549, 15 об/мин.
Коэффициент замедления: 1:20
Выходной вал: диаметр эксцентрикового вала D 6 мм.
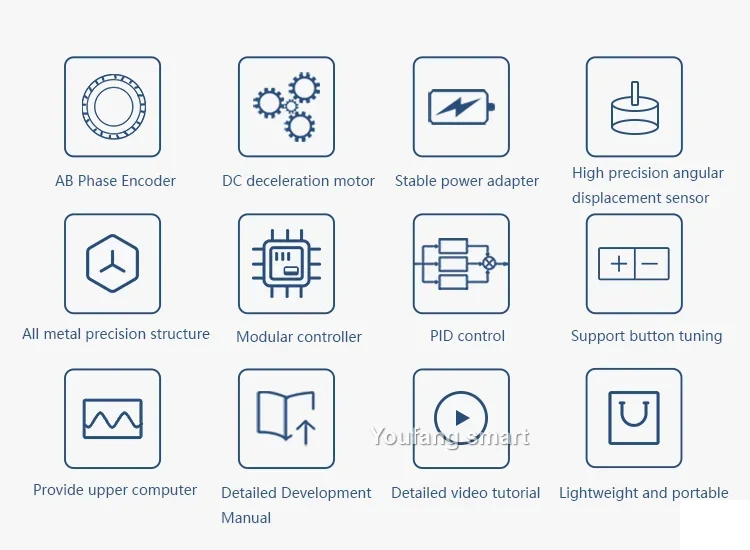
Параметр энкодера
Тип: Энкодер Холла
Количество линий: 260 (измеряется по выходному валу редуктора)
Напряжение питания: 5,0 В
Тип интерфейса: XH2,54 (стандартный кабель)
Особенности: С подтягивающим формованием (STM32/Arduino и т. д.)MCU можно читать напрямую
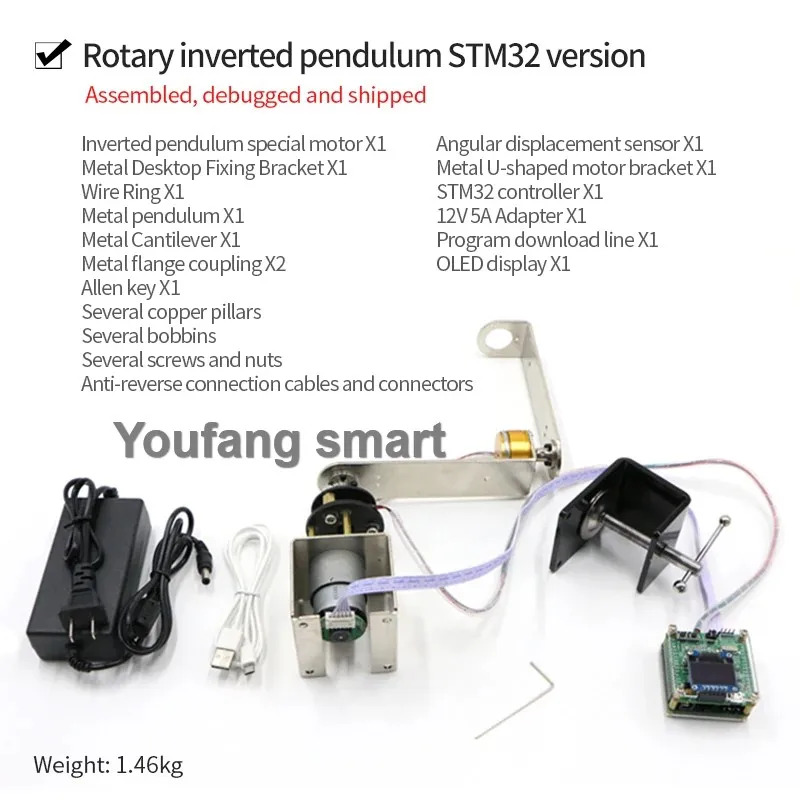
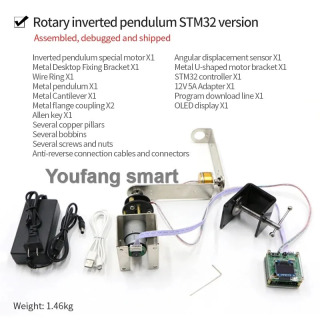
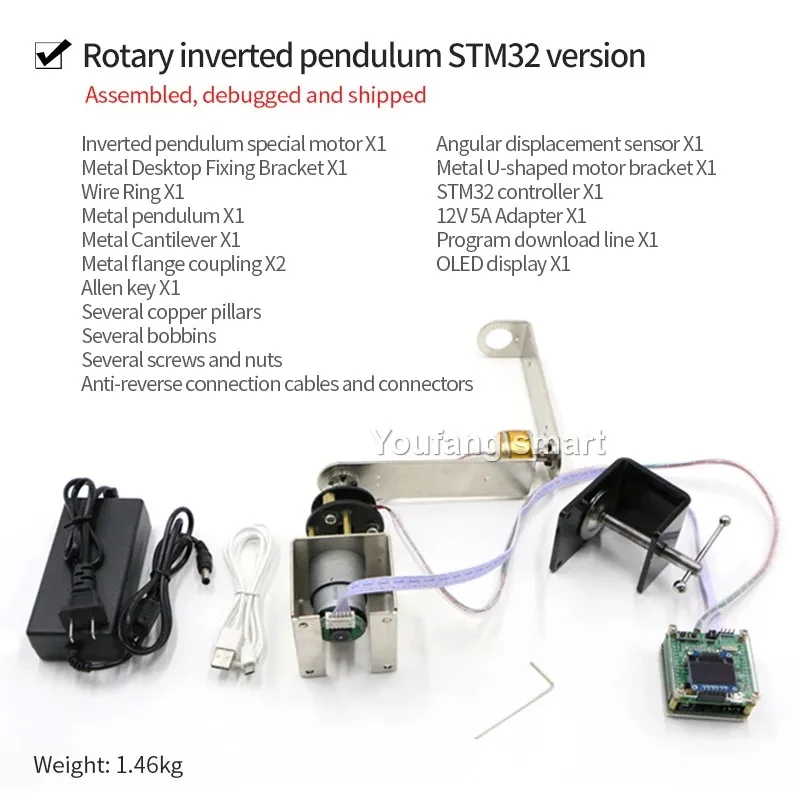
Упаковочный лист:
1.Без контроллера: 1 комплектПеревернутый маятник
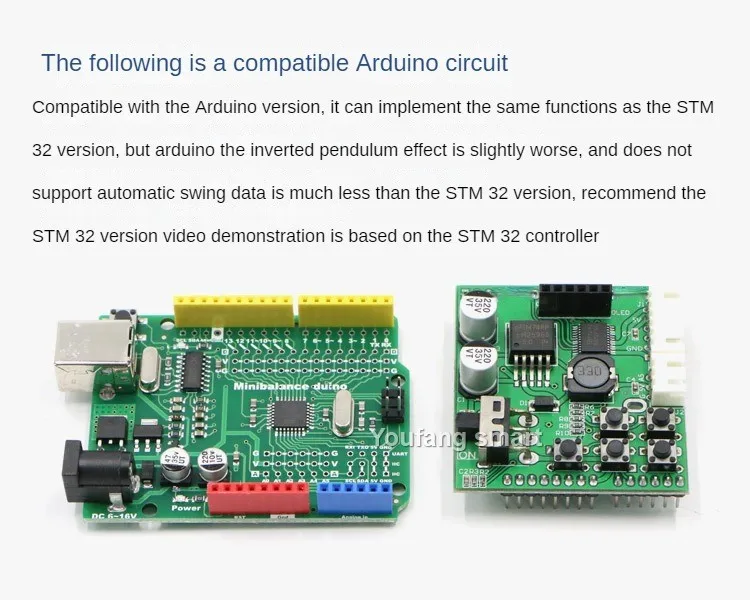
2.Для Arduino полный комплект: 1 комплект Перевернутый маятник + для контроллера Arduino
2.STM32 полный комплект: 1 комплект Перевернутый маятник + контроллер STM32
Лучшее качество, лучший сервис!!
Технические документы, как показано ниже, самая полная разработка и дизайн, вы заслуживаете того, чтобы иметь этот инженерный проект, мы делаем технологии в первую очередь, обслуживаем, а не просто продаем товары.
Если вам нужен руководство по программам и файлам разработки роботов, такие как открытый исходный код, документ по установке и так далее.
пожалуйста, свяжитесь с нами и оставьте свой адрес электронной почты.










Tovar savatga qo'shildi!